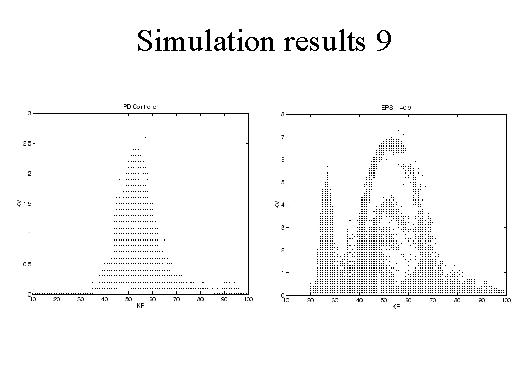
| Just as in the case of the previous manipulator we can also derive chaos maps, values of the gains under which the robot is chaotic. It might not be visible very clearly, but you can obtain values of KP and KV under which the system can behave chaotic. |
|