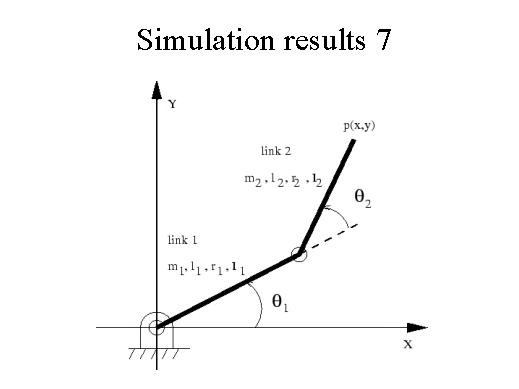
| One can also consider other robots. In the next example we considered a robot which is of the form two rotary joints connected together and there is a motor which is actuating this first link and there is a motor which is actuating the second link. In this case also we can derive the equations of motion and I will not go into detail, but it is available in many textbooks. |
|