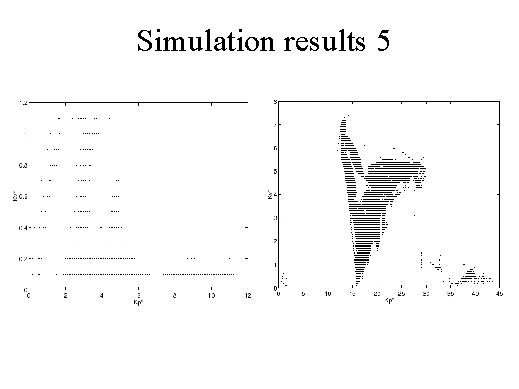
| Another thing since we now have a program, simulation program, we can also check under what conditions this robot will exhibit chaos. One of the possible conditions is to change the gains in a small manner and we find all possible values of the gains which will show chaos. And for this simulation we have used a certain set of initial conditions and you can show that in this Kp Kv space where Kp and Kv are the proportional and derivative gains respectively. All this shaded region, all values of Kp and Kv lying in this shaded region will exhibit chaos. |
|