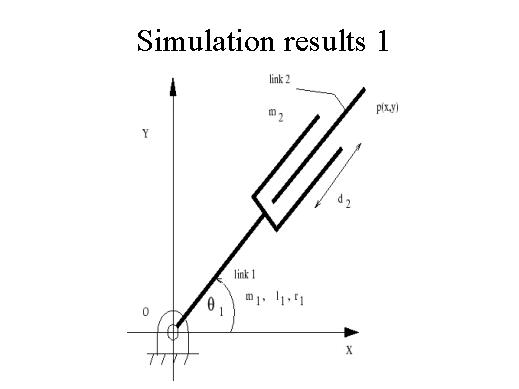
| So, let's look very quickly at one of the robots. This a robot consisting of a rotary joint and a prismatic joint or a sliding joint. One can derive the equations of motion of this robot which will be two differential equations, two second order differential equations. Notice that the non-linearity here is of the form of a product of the two variables. Here it is like a square of the two variables. |
|