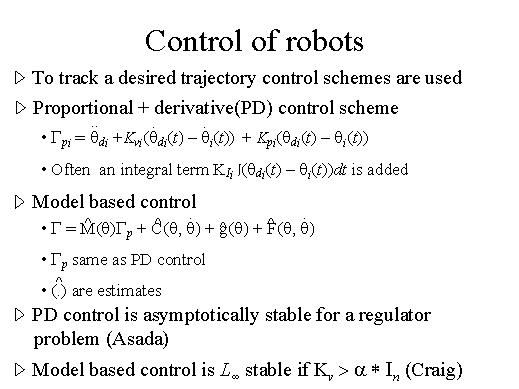
One is a very
well known controller called a proportional plus derivative control scheme
in which the torque or the forces which are acting at the robot joints are
proportional to the error, proportional to the derivative of the error and
maybe some feed-forward term. Often an integral term is also added. Another
common controller which is used in robots is called as a model based controller
in which the torque is proportional not only to the previous proportional
plus derivative controller but it is also multiplied by the mass matrix
of the robot and there is a bias which consists of the estimated non-linear
terms.
It has been known in literature that a proportional plus derivative controller
is asymptotically stable. We can show that the error between what we want,
how the robot should move and how the robot is behaving will always tend
to zero, which is what is expected of any controller. We try to do the same
thing for various robots.
| 
|