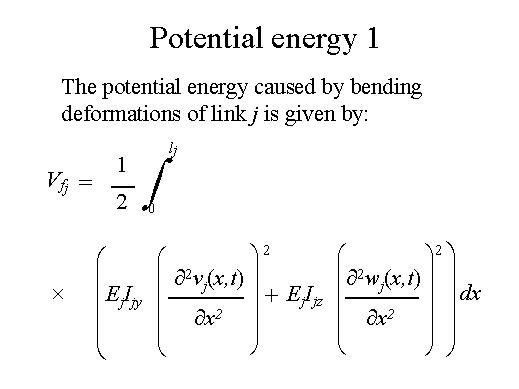
| The potential energy of the flexible manipulator system arises from two sources: the deformation of the links and gravity. Assuming slender beam type links and neglecting the axial and torsional vibration of links, the potential energy caused by bending deformation of link j about the transverse axes is given here, where Ej is the Young's modulus, and Ijy, Ijz are the area moments of inertia about the respective axes of link j. |
|