The dynamic
equations of motion are obtained using Lagrange's formulation of dynamics.
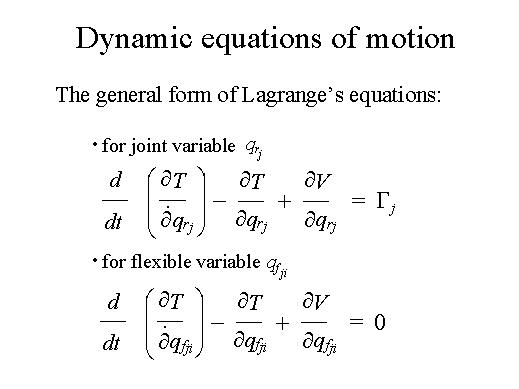
It may be noted that the generalised force corresponding to joint variable
qr, is the joint point Gj
(torque tj
for a revolute joint, or force Fj for a prismatic joint). For the
flexible deformation variables (qf),
the corresponding generalised force will be zero, if the corresponding elastic
deflections or rotations have no displacement at those locations where external
forces are applied; note that this corresponds to the case when a clamped
condition is used for the controlled end of the link.
The general form of Lagrange's equations (for the clamped condition), then,
for joint variable qr, are the
following, where T is the total kinetic energy of the flexible manipulator
system, and V is the total potential energy owing to elastic deformations
and gravity.
| 
|