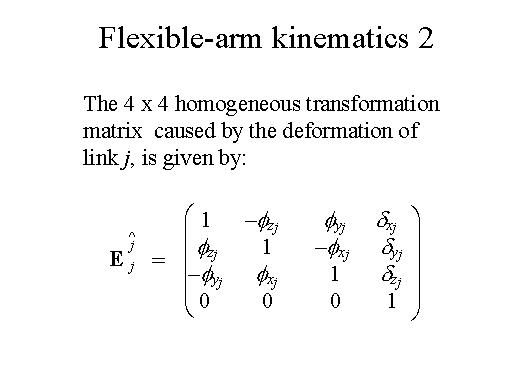
The 4 x 4 homogeneous transformation matrix from a coordinated system to the other caused by the deformation of link
j
, - assuming small elastic deformations - is given here.