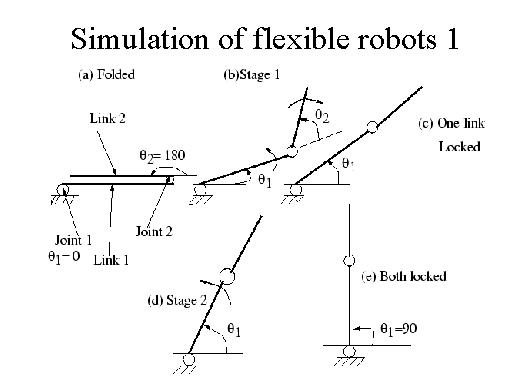
So, let's try to see whether we can reproduce that experimental data using this modelling technique. To recapitulate what we had is two links, one link like this, another link like this. They are initially in a folded configuration like this. And then they start moving in opposite directions. After some time the second joint locks and then this whole system starts moving as a single link flexible manipulator. It continues to move and eventually this joint will also lock and this thing will behave as a cantilever with one end fixed. We would like to predict the motion of all these different stages and in addition we would like to obtain the values of the strains as a function of time. And the vibrations as a function of time and compare with experiments.