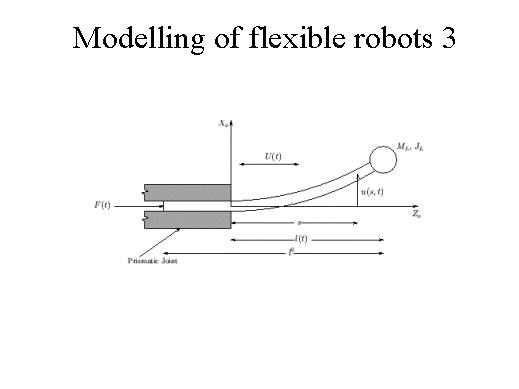
| Another typical member which is present in many robots is what is called as a flexible link with a sliding joint. A sliding joint is different from a rotary joint in the sense that this same member, flexible member can travel in and out of a rigid block, so, it is like a piston going in and a slider. We need to model this also. |
|