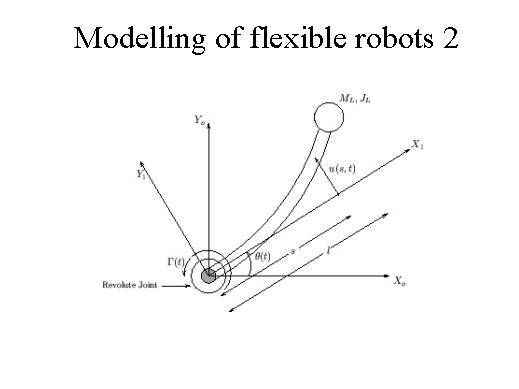
| One typical link is shown in this figure where we have a link which is carrying some weight at the end and the other end of the link is attached to a motor. This is a model of a revolute joint. So, in this figure I have shown that the line along the x-axis is the undeformed position of this link. It is rotated by an angle theta. But on top of this rigid rotation of the link we have some flexible displacement u(s,t). This link can bend about this rigid configuration. |
|