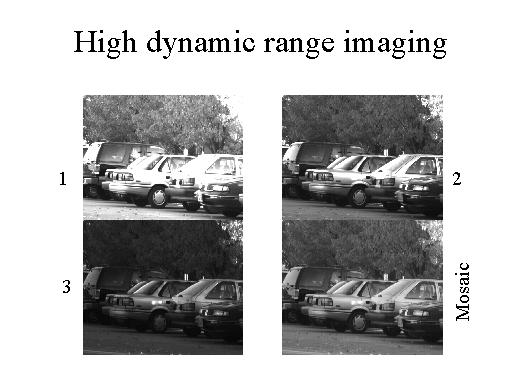
However if you want to capture the car surface well, you are to turn your sensitivity down which brings the car into a better range that means car detail is captured better. Then the tree details gets lost because they are two faint to affect this camera sensor that is not captured well. So the tree is lost but the car is not captured better.
Here for example you can see some of the sky behind the trees, which is neither captured well as in 1 or 2, but now is much better captured that 3. In particular you can see that the top right corner of the image number 3 has the leaves structure showing up here, which is not very visible well in 2 and 1. So now what you can do is to take 1, 2 and 3 and take the best of these images and put them into a single image, which is a mosaic, so to say of 1, 2 and 3. And this is an image in which all details are captured well despite the fact there is brightness range which is much larger than the camera can handle.