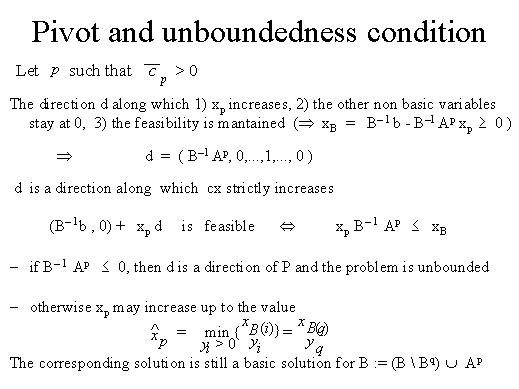
Otherwise, let's assume that some reduced cost, say that of variable
xp, is strictly greater than 0 and consider the direction d on which:
- increases;
- all the other non basic variables remain fixed to 0 and 3;
- the basic variables change in order to maintain the feasibility of the solution.
Because of the fact that the reduced cost is strictly greater than 0,
d is a direction on which the value of cx strictly increases.
So it is convenient to move from the actual basic solution along the direction
d as much as possible. Now two cases may occur. If d is a direction of
the polyhedron P, then we can move indefinitely on this ray remaining
in P and thus the problem is unbounded. Otherwise the shift along the
direction d is blocked by the feasibility condition and it actually corresponds
to the value hatxp given by the formula. The corresponding solution is
in fact a new basic solution since one of the basic variables, say the
one at position q in the basis, has reached the value 0.
At this point the method updates the basic matrix B, its inverse and the
basic solution with a so called pivot operation.