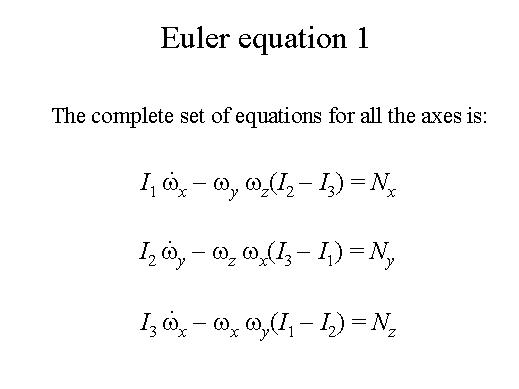
| The identification of some one of the principal axes as the z-axis is entirely arbitrary. Clearly we can permute the indices and write an equation similar to Lagrangian equation 1 for the component of the total torque along any of the other principal axes. Without further ado, the complete set of equations for all the axes is indicated here. These are the so-called Euler equations of motion for a rigid body with one point fixed. |
|