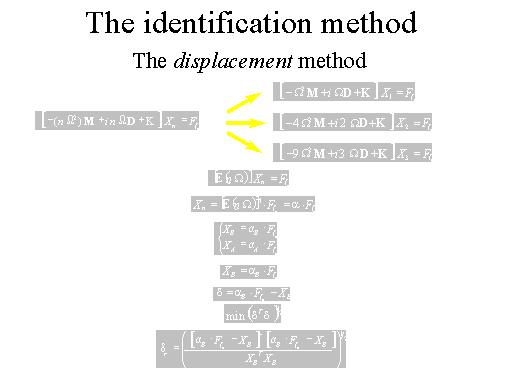
The first is called displacement method. It starts from the harmonic decomposition of the dynamical equation of the system. We have a first equation for the first harmonic component; a second equation for the second harmonic component and a third equation for the third harmonic component.
In any case we can generalise our procedure introducing the elastodynamic matrix. Since the elastodynamic matrix is a square matrix, it is possible to calculate its inverse and to determine the displacements. Now it is possible to separate the component of the vector of the displacement in two parts: the displacements which are outside of the bearings and those which are relative to the bearings. Since in real machines the experimental measure are usually taken in the bearings, we consider just the displacements in the bearings. Then a residual is defined as a difference between the measured vibrations and the calculated by means of the force models. The identified fault is that one which minimises the residual.
Also a relative residual, which values range from 0 to 1, can be defined in order to evaluate the accuracy of the identification, which is as good as the value is close to 0.