Since the critical speeds are excited by the unbalance which is present
on the rotor, and as we have shown in Jeffcott rotor, the vibration amplitude
is directly proportional to the unbalance, so in all rotors the unbalance
has to be reduced to very small amounts. This can be performed with the
balancing procedures.
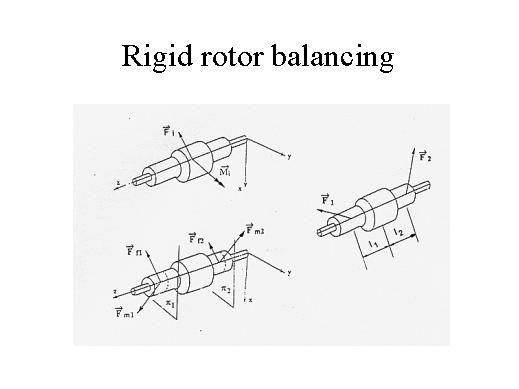
If the rotor can be considered rigid, the actual distribution of inertia
forces can be substituted by their resultant force and moment, as shown
in figure, where also the further equivalent force system composed of
two forces acting in correspondence of the balancing planes is represented.
It is obvious that we need two balancing planes in order to balance both
the resultant force and the resultant moment. As shown in the Figure it
is sufficient to fix on the balancing planes two masses at a fixed radial
distance, so that their centrifugal forces are equal and opposite to the
force system due to the unbalance.
Rotors can be considered rigid if their maximum operating speed is below
their first critical speed at least by a 30%. Most electric motors have
rigid rotors, some single stage compressors or pumps and small single
stage steam turbines also.